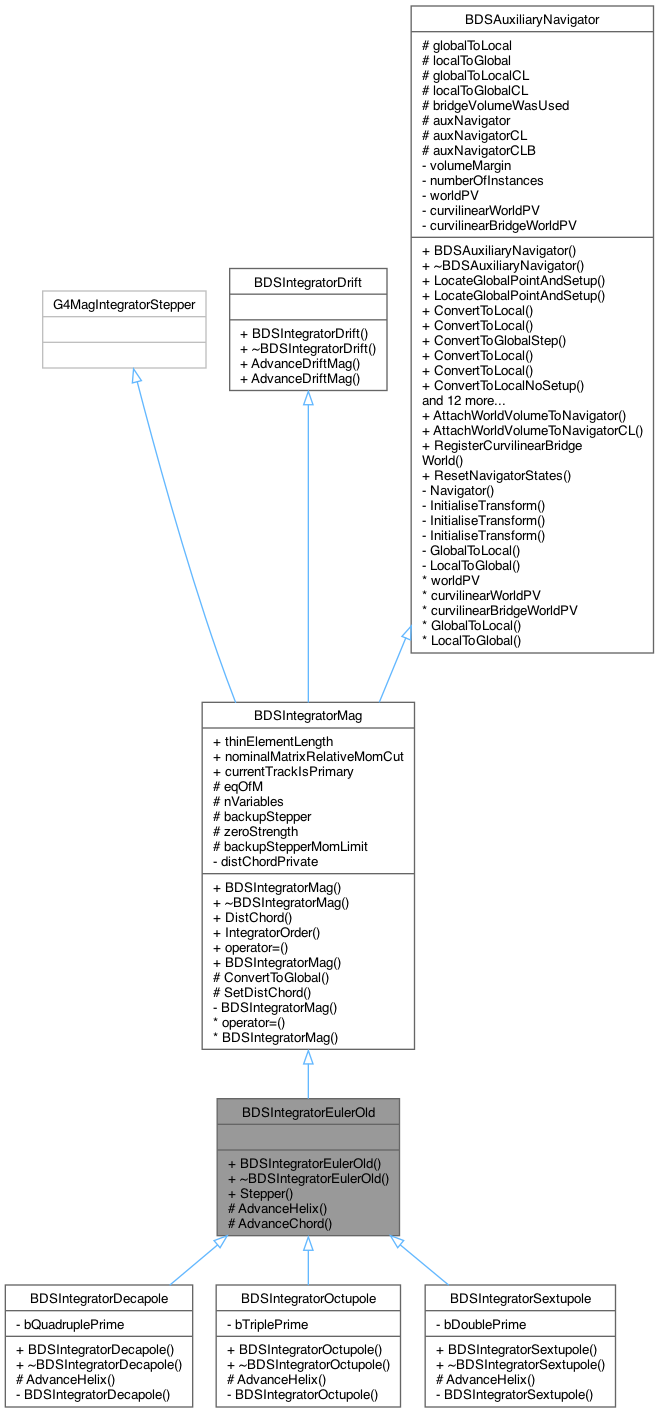
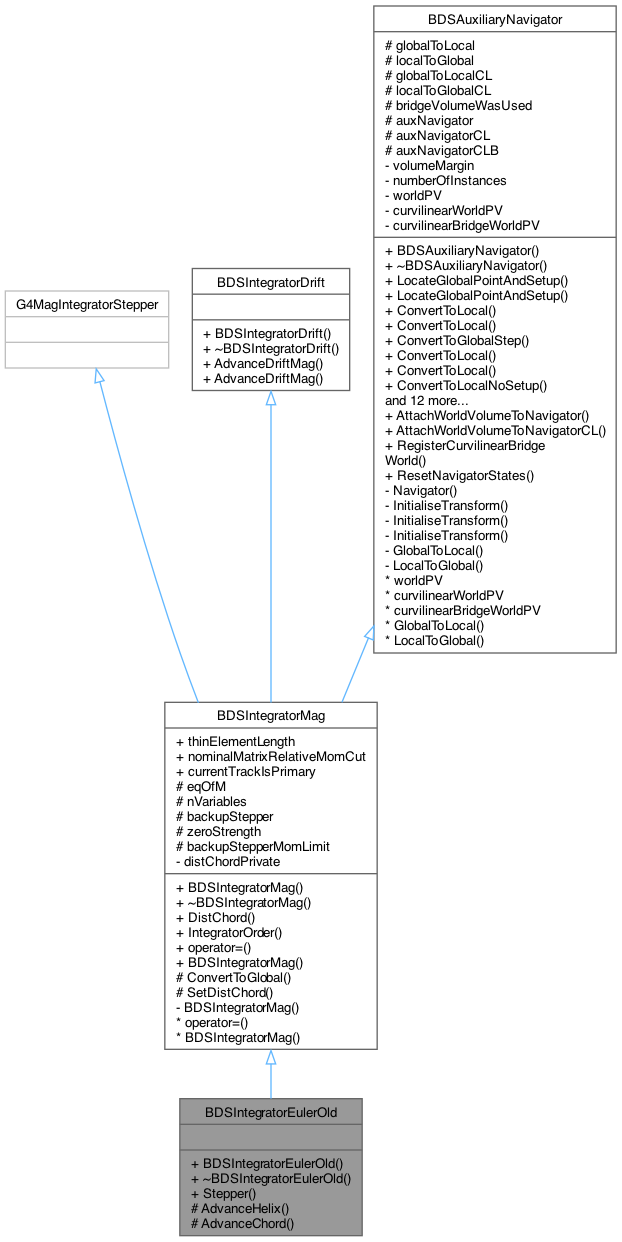
Common functionality for Euler integrators. More...
#include <BDSIntegratorEulerOld.hh>
Public Member Functions | |
| BDSIntegratorEulerOld (G4Mag_EqRhs *eqOfMIn) | |
| virtual void | Stepper (const G4double yIn[], const G4double dydx[], const G4double h, G4double yOut[], G4double yErr[]) |
 Public Member Functions inherited from BDSIntegratorMag Public Member Functions inherited from BDSIntegratorMag | |
| BDSIntegratorMag (G4Mag_EqRhs *eqOfMIn, G4int nVariablesIn) | |
| virtual G4double | DistChord () const |
| Estimate maximum distance of curved solution and chord. | |
| virtual G4int | IntegratorOrder () const |
| Geant4 requires that the integrator order must be supplied by the derived class. | |
| BDSIntegratorMag & | operator= (const BDSIntegratorMag &)=delete |
| Assignment and copy constructor not implemented nor used. | |
| BDSIntegratorMag (BDSIntegratorMag &)=delete | |
| Assignment and copy constructor not implemented nor used. | |
| Public Member Functions inherited from BDSIntegratorDrift | |
| void | AdvanceDriftMag (const G4double yIn[], const G4double h, G4double yOut[], G4double yErr[]) const |
| Error array [6] all 0. | |
| void | AdvanceDriftMag (const G4double yIn[], const G4ThreeVector &unitMomentum, const G4double h, G4double yOut[], G4double yErr[]) const |
| Public Member Functions inherited from BDSAuxiliaryNavigator | |
| G4VPhysicalVolume * | LocateGlobalPointAndSetup (const G4ThreeVector &point, const G4ThreeVector *direction=nullptr, const G4bool pRelativeSearch=true, const G4bool ignoreDirection=true, G4bool useCurvilinear=true) const |
| A wrapper for the underlying static navigator instance located within this class. | |
| G4VPhysicalVolume * | LocateGlobalPointAndSetup (G4Step const *const step, G4bool useCurvilinear=true) const |
| BDSStep | ConvertToLocal (G4Step const *const step, G4bool useCurvilinear=true) const |
| BDSStep | ConvertToLocal (const G4ThreeVector &globalPosition, const G4ThreeVector &globalDirection, const G4double stepLength=0, const G4bool useCurvilinear=true, const G4double marginLength=1) const |
| BDSStep | ConvertToGlobalStep (const G4ThreeVector &localPosition, const G4ThreeVector &localDirection, const G4bool useCurvilinear=true) const |
| G4ThreeVector | ConvertToLocal (const G4double globalPoint[3], const G4bool useCurvilinear=true) const |
| G4ThreeVector | ConvertToLocal (const G4ThreeVector &globalPosition, const G4bool useCurvilinear=true) const |
| Vector version - see notes above. | |
| G4ThreeVector | ConvertToLocalNoSetup (const G4ThreeVector &globalPosition, const G4bool useCurvilinear=true) const |
| Similar to above function but does NOT initialise the transforms. | |
| G4ThreeVector | ConvertAxisToLocal (const G4ThreeVector &globalAxis, const G4bool useCurvilinear=true) const |
| G4ThreeVector | ConvertAxisToLocal (const G4double globalPoint[3], const G4double globalAxis[3], const G4bool useCurvilinear=true) const |
| G4ThreeVector | ConvertAxisToLocal (const G4ThreeVector &globalPoint, const G4ThreeVector &globalAxis, const G4bool useCurvilinear=true) const |
| Vector version. | |
| G4ThreeVector | ConvertAxisToGlobal (const G4ThreeVector &localAxis, const G4bool useCurvilinear=true) const |
| std::pair< G4ThreeVector, G4ThreeVector > | ConvertAxisToGlobal (const std::pair< G4ThreeVector, G4ThreeVector > &localAxis, const G4bool useCurvilinear=true) const |
| G4ThreeVector | ConvertToGlobal (const G4ThreeVector &localPosition, const G4bool useCurvilinear=true) const |
| G4ThreeVector | ConvertAxisToGlobal (const G4ThreeVector &globalPosition, const G4ThreeVector &localAxis, const G4bool useCurvilinear=true) const |
| G4ThreeVector | ConvertToGlobal (const G4ThreeVector &globalPosition, const G4ThreeVector &localPosition, const G4bool useCurvilinear=true) const |
| BDSStep | GlobalToCurvilinear (const G4double fieldArcLength, const G4ThreeVector &unitField, const G4double angle, const G4ThreeVector &position, const G4ThreeVector &unitMomentum, const G4double h, const G4bool useCurvilinearWorld, const G4double FCof, const G4double tilt=0) |
| BDSStep | GlobalToCurvilinear (const G4ThreeVector &position, const G4ThreeVector &unitMomentum, const G4double h, const G4bool useCurvilinearWorld) |
| BDSStep | CurvilinearToGlobal (const G4ThreeVector &localPosition, const G4ThreeVector &localMomentum, const G4bool useCurvilinearWorld) |
| BDSStep | CurvilinearToGlobal (const G4double fieldArcLength, const G4ThreeVector &unitField, const G4double angle, const G4ThreeVector &CLPosition, const G4ThreeVector &CLMomentum, const G4bool useCurvilinearWorld, const G4double FCof, const G4double tilt=0) |
Protected Member Functions | |
| virtual void | AdvanceHelix (const G4double yIn[], G4double h, G4double yOut[], G4double yErr[])=0 |
| void | AdvanceChord (const G4double h, G4ThreeVector &localPos, G4ThreeVector &localMom, const G4ThreeVector &localA) |
| Protected Member Functions inherited from BDSIntegratorMag | |
| void | ConvertToGlobal (const G4ThreeVector &localPos, const G4ThreeVector &localMom, G4double yOut[], G4double yErr[], const G4double momScaling=1.0) |
| scaling of momentum in case localMom is a unit vector | |
| void | SetDistChord (G4double distChordIn) |
| Setter for distChord to private member. | |
Additional Inherited Members | |
| Static Public Member Functions inherited from BDSAuxiliaryNavigator | |
| static void | AttachWorldVolumeToNavigator (G4VPhysicalVolume *worldPVIn) |
| Setup the navigator w.r.t. to a world volume - typically real world. | |
| static void | AttachWorldVolumeToNavigatorCL (G4VPhysicalVolume *curvilinearWorldPVIn) |
| static void | RegisterCurvilinearBridgeWorld (G4VPhysicalVolume *curvilinearBridgeWorldPVIn) |
| static void | ResetNavigatorStates () |
| Static Public Attributes inherited from BDSIntegratorMag | |
| static G4double | thinElementLength = -1 |
| static G4double | nominalMatrixRelativeMomCut = -1 |
| static G4bool | currentTrackIsPrimary = false |
| Protected Attributes inherited from BDSIntegratorMag | |
| G4Mag_EqRhs * | eqOfM |
| const G4int | nVariables |
| Cache of the number of variables. | |
| G4MagIntegratorStepper * | backupStepper |
| G4bool | zeroStrength |
| G4double | backupStepperMomLimit |
| Protected Attributes inherited from BDSAuxiliaryNavigator | |
| G4AffineTransform | globalToLocal |
| G4AffineTransform | localToGlobal |
| G4AffineTransform | globalToLocalCL |
| G4AffineTransform | localToGlobalCL |
| G4bool | bridgeVolumeWasUsed |
| Static Protected Attributes inherited from BDSAuxiliaryNavigator | |
| static G4Navigator * | auxNavigator = new G4Navigator() |
| static G4Navigator * | auxNavigatorCL = new G4Navigator() |
| static G4Navigator * | auxNavigatorCLB = new G4Navigator() |
Detailed Description
Common functionality for Euler integrators.
Definition at line 34 of file BDSIntegratorEulerOld.hh.
Constructor & Destructor Documentation
◆ BDSIntegratorEulerOld()
|
explicit |
Definition at line 30 of file BDSIntegratorEulerOld.cc.
◆ ~BDSIntegratorEulerOld()
|
inlinevirtual |
Definition at line 38 of file BDSIntegratorEulerOld.hh.
Member Function Documentation
◆ AdvanceChord()
|
protected |
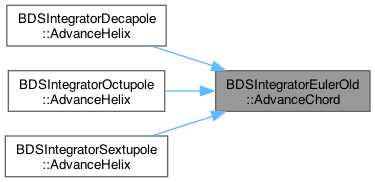
Advance chord by quadratic approximation. Can throw a std::out_of_range exception for inappropriate use of paraxial approximation.
Definition at line 86 of file BDSIntegratorEulerOld.cc.
References BDS::IsFiniteStrength(), and BDSIntegratorMag::SetDistChord().
Referenced by BDSIntegratorDecapole::AdvanceHelix(), BDSIntegratorOctupole::AdvanceHelix(), and BDSIntegratorSextupole::AdvanceHelix().

◆ AdvanceHelix()
|
protectedpure virtual |
Expected method in derived class to calculate the output coordinates for given input coordinates along step length h.
Implemented in BDSIntegratorDecapole, BDSIntegratorOctupole, and BDSIntegratorSextupole.
Referenced by Stepper().

◆ Stepper()
|
virtual |
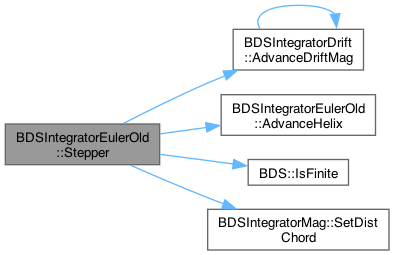
Call AdvanceHelix pure virtual function. If the local unit momentum z component is less than 0.9 or the absolute magnitude of the momentum is < 40MeV, use the backup stepper. Otherwise compare a single full step and two half steps for the error calculation. Use the value of two half steps as the output coordinates.
Definition at line 34 of file BDSIntegratorEulerOld.cc.
References BDSIntegratorDrift::AdvanceDriftMag(), AdvanceHelix(), BDSAuxiliaryNavigator::auxNavigator, BDSIntegratorMag::backupStepper, BDSIntegratorMag::eqOfM, BDS::IsFinite(), BDSIntegratorMag::nVariables, BDSIntegratorMag::SetDistChord(), and BDSIntegratorMag::zeroStrength.
The documentation for this class was generated from the following files:
- /Users/lnevay/physics/reps/bdsim/include/BDSIntegratorEulerOld.hh
- /Users/lnevay/physics/reps/bdsim/src/BDSIntegratorEulerOld.cc